Ultra Sonic Distance Measurement
 R1 = 330 Ohm, R2 = 470 Ohm
R1 = 330 Ohm, R2 = 470 Ohm
To monitor the water storage in my cistern I decided for a HCSR04 sensor module.To avoid uncontrolled reflexes by the volume and the build in technique like pipes, I installed the sensor centrally of the manhole of the water reservoir at a height, that it is safely over the maximal gauge.

Python interface
Following this tutorial, I created my own interface to read the water level:
import numpy as np import datetime import time import RPi.GPIO as GPIO class HvcHCSR04ultrasonic: def __init__(self): self.GPIO_Trig = 15 self.GPIO_Echo = 14 self.speed = 34300 # cm/s self.depth = 199 # cm self.hMax = 170 # cm # my reservoir: # D=2.1m; Hmax=1.7m; A=3.46m^2; V=5.89m^3 GPIO.setwarnings(False) #probably you already use HvcSetGPIO GPIO.setmode(GPIO.BCM) GPIO.setup(self.GPIO_Trig, GPIO.OUT) GPIO.setup(self.GPIO_Echo, GPIO.IN) def distance(self): # set trigger HIGH GPIO.output(self.GPIO_Trig, GPIO.HIGH) # set trigger LOW again to initiate measurement time.sleep(0.00001) GPIO.output(self.GPIO_Trig, GPIO.LOW) start = time.time() stop = time.time() timeOut = time.time() failure=False # measurement starts, once ECHO is set HIGH while GPIO.input(self.GPIO_Echo) == 0: start = time.time() if start>timeOut+0.3: failure=True failureType="Trigger" break # measurement ends, when ECHO is set LOW again while GPIO.input(self.GPIO_Echo) == 1: stop = time.time() if stop>start+0.3: failure=True failureType="Echo" break # compute the distance, sound travels forth and back if failure: print("ERROR: ultrasonic",failureType,timeOut,start,stop) dist=200 else: elapsedTime = stop - start dist = (elapsedTime * self.speed) / 2.0 #print(dist) return dist def filter(self,dist): if dist<=0: #too short, not plausible pass elif dist>=self.depth: #too long, not plausible pass elif HvcHCSR04ultrasonic.distFlt == -1.0: HvcHCSR04ultrasonic.distFlt = dist else: w=0.1 lowPass = (1.0-w)*HvcHCSR04ultrasonic.distFlt + w*dist HvcHCSR04ultrasonic.distFlt = lowPass return HvcHCSR04ultrasonic.distFlt def volume(self,dist): #distance to height hRel = (self.depth-dist)/self.hMax * 100.0 return hRel #persistant variables: HvcHCSR04ultrasonic.distFlt = -1.0 if __name__ == "__main__": H2O = HvcHCSR04ultrasonic() dist = H2O.distance() distFlt = H2O.filter(dist) fill = H2O.volume(distFlt) print(dist,distFlt,fill)
If you use GPIO14 + GPIO15, then do
sudo raspi-config > Advanced > Serialto disable the serial port.
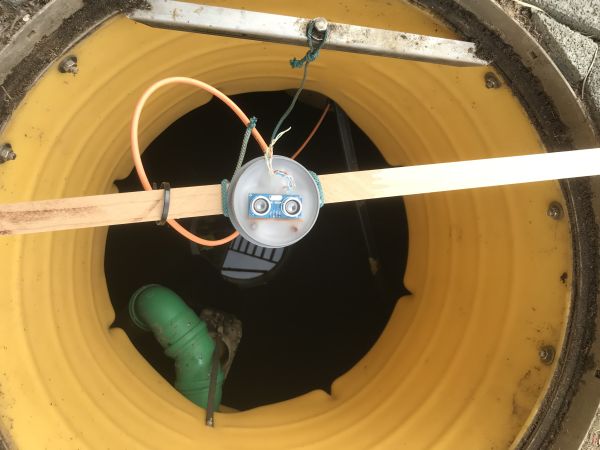
I mounted the HCSR04 in a plastic cap and after the electrical connection, I sealed everything by filling the cap with candle wax to keep the humidity off the electronis. Only the tips of speaker and microphone look out of the wax.
To avoid disturbing echos from the walls, I positioned the sensor at the center of the manhole.